近日,重庆交通大学智慧城市学院智能感知与数字孪生团队在跨模态2D-3D特征匹配研究方面取得重要进展,相关成果《Cross-modal 2D-3D feature matching: simultaneous local feature description and detection across images and point clouds》发表于国际遥感与摄影测量领域顶级期刊《ISPRS Journal of Photogrammetry and Remote Sensing》(中科院一区,Top期刊,影响因子12.2)。该研究提出了一种新型联合特征描述与检测网络CMFM-Net,实现了图像与点云之间的高效、精准匹配,为智慧城市、自动驾驶、三维重建等领域的多源数据融合提供了关键技术支撑。智慧城市学院马威副教授为论文第一作者,硕士生黄昱程、潘建平教授为论文共同作者,香港理工大学王冰助理教授为通讯作者。
在智慧城市建设、高精地图构建、无人系统导航等应用中,如何将二维图像与三维点云进行准确对齐是一项核心难题。传统方法依赖稠密三维重建,计算成本高且在纹理缺失环境下表现不佳。重庆交通大学智慧城市学院研究团队创新性地提出一种双分支全卷积网络架构,通过超宽感受野机制增强图像特征的上下文信息提取能力,并结合非局部极大值抑制策略同步评估图像像素与三维点云的特征显著性,有效解决了二维与三维数据之间的模态差异与分布不均匀问题。

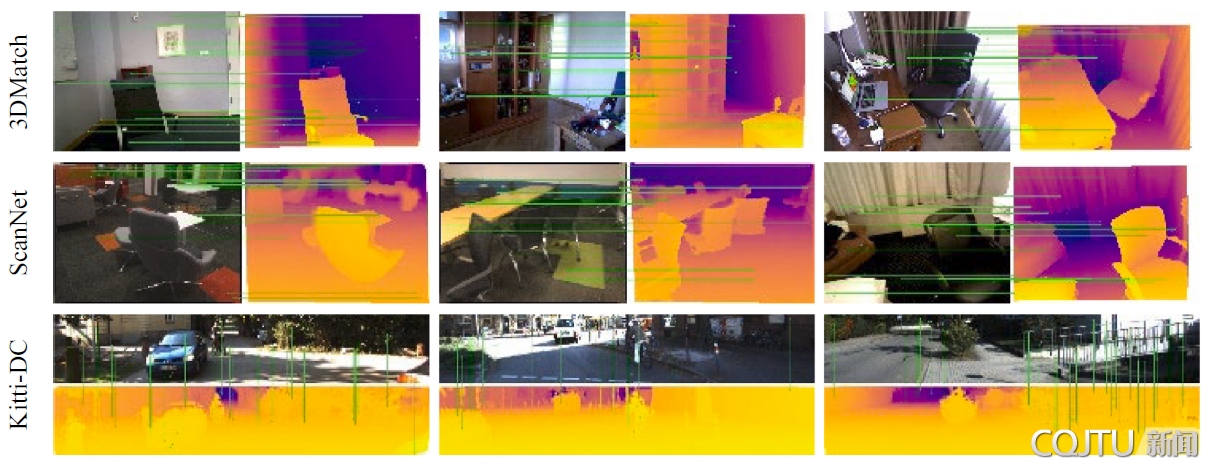
此外,团队设计了新的损失函数,形成联合优化目标,使网络能够同时学习具有区分性的特征描述符并提升关键点的可重复检测能力。在多个公开数据集(包括3DMatch、ScanNet、Kitti-DC等)上的实验表明,CMFM-Net在特征匹配召回率、内点比率、配准召回率等多项评价指标上均显著优于现有主流方法,展现出优异的跨模态匹配性能和强鲁棒性。
该研究成果由重庆交通大学智慧城市学院牵头,联合深圳大学、武汉大学、天津测绘院、香港理工大学等单位共同完成。研究得到国家自然科学基金青年项目(42301520)、香港研资局早期职业生涯计划(25206524)、重庆市教委科技研究项目(KJQN202200744)及深圳市空间智能感知与服务重点实验室开放课题(GEMLab-2024001)等项目的支持。
此次突破性研究成果的发表,标志着重庆交通大学智慧城市学院在计算机视觉、三维视觉与智慧城市交叉领域的研究实力得到国际同行的高度认可,也为学院在“智能感知与数字孪生城市”方向的学科建设与产学研融合提供了重要支撑。未来,团队将继续围绕多模态数据融合、轻量化网络设计与高精度定位等方向开展深入研究,推动相关技术在实际场景中的落地应用。
引用信息:Wei Ma, Yucheng Huang, Shengjun Tang, Xianwei Zheng, Zhen Dong, Liang Ge, Jianping Pan, Qingquan Li, Bing Wang*, Cross-modal 2D-3D feature matching: simultaneous local feature description and detection across images and point clouds [J], ISPRS Journal of Photogrammetry and Remote Sensing, Volume 229, 155-169, 2025..
DOI:10.1016/j.isprsjprs.2025.08.016