近日,重庆交通大学机电与车辆工程学院在柔性电子领域取得最新研究成果,青年教师彭思达以第一作者及通讯作者身份在国际高水平学术期刊《FlexMat》发表题为“Multi-material and dual-stimulus coupled actuation micro-gears for shape–rotation control in intelligent micro-electro-mechanical systems”的研究论文。该刊为聚焦柔性电子与先进材料交叉前沿的高水平期刊,即时影响因子达20,入选中国科技期刊卓越行动计划高起点新刊项目,具有较强的学术影响力与国际认可度。
随着智能微机电系统(MEMS)、微流控芯片和生物医学微机器人等技术快速发展,微尺度驱动器作为实现复杂环境中精准操控与自主响应的关键核心部件,正成为国际学术界和产业界关注的热点方向。然而,面对动态变化、成分复杂的微环境,传统单一刺激响应的微驱动器难以同时实现环境感知、远程操控和多功能协同,成为制约领域发展的关键瓶颈。
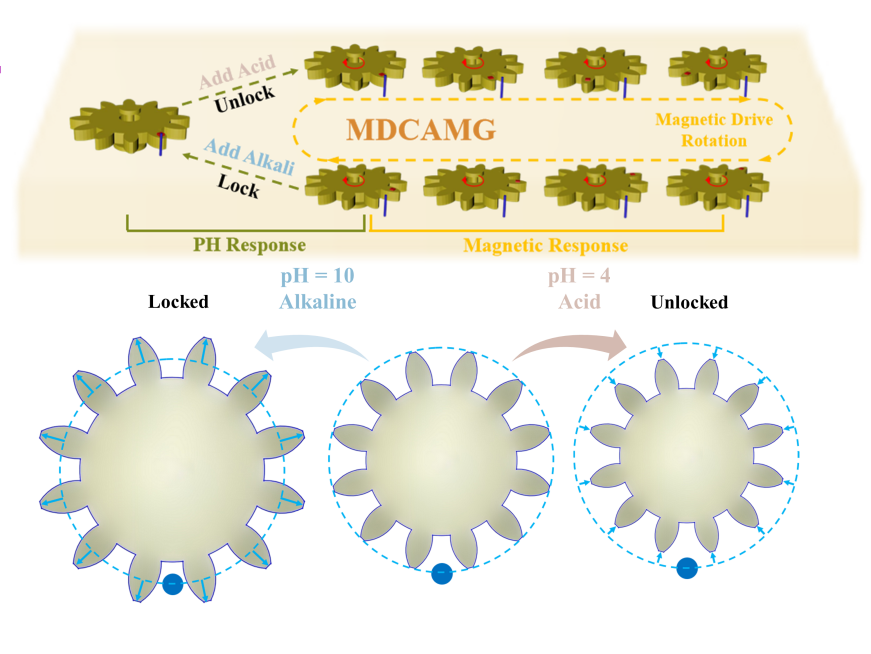
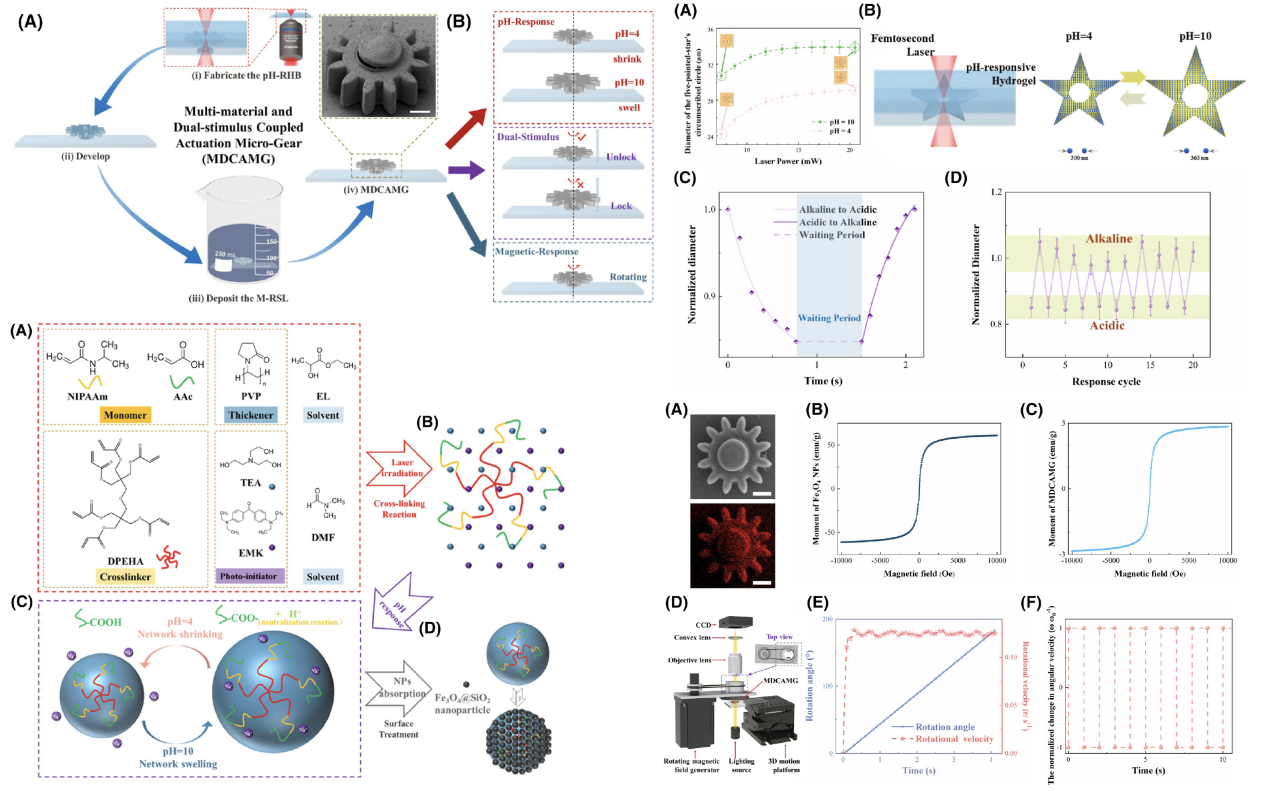
聚焦这一前沿挑战,我院教师取得重要研究进展。研究团队创新性构建了多材料、双刺激耦合驱动微齿轮(MDCAMG),通过飞秒激光三维打印与磁性纳米颗粒吸附相结合,实现pH响应水凝胶与磁响应表面的高效集成,首次在微尺度系统中实现“形状—运动”一体化协同调控。该微齿轮在不同酸碱环境中可实现可逆溶胀与收缩,完成尺寸调节与环境感知;同时在外加磁场作用下实现远程驱动旋转,支持转速调控与方向切换。两类功能在同一器件中既独立响应、又高效协同,显著提升了微尺度系统的智能响应能力与运动可控性。
研究结果表明,该体系具有响应速度快、循环稳定性高、调控精度优异等突出优势,在复杂微环境中表现出良好的适应能力。相关成果为智能微机电系统及微流控领域的多功能集成提供了新思路,也为微型机器人和精准医疗器件发展提供了重要支撑。
此次成果的取得,彰显了学院在智能微纳制造与微机电系统领域的持续创新实力,也展现了青年教师深耕前沿、勇于突破的科研活力。学院将进一步聚焦学科前沿,持续推动高水平成果产出,不断提升科研创新能力和学术影响力。
文章链接:http://doi.org/10.1002/flm2.70057