2024年12月,我校吕振明研究生、董绍江教授在建筑工程领域的国际顶级期刊《Automation in Consturction》(影响因子10.3)上发表题为《Enhanced Real-Time Detection Transformer (RT-DETR) for Robotic Inspection of Underwater Bridge Pier Cracks》的研究论文。
桥梁桩基作为涉水桥梁的重要结构之一,不仅承受着桥梁的自身的载荷,还承载着大量的交通流量和货物运输。随着桥梁的年龄增长和交通负荷的增加,桥梁桩基难免存在一定缺陷。问题一旦出现,将会给桥梁带来重大安全隐患,从而对社会经济造成重大损失。随着机器人技术、传感器技术、图像处理技术以及人工智能算法的飞速发展,为研发水下机器人进行桥墩检测提供了技术支持。该检测手段风险小、成本低、效率高、可靠性高且稳定性好,是目前桥梁大坝用于表面缺陷检测的重要手段。
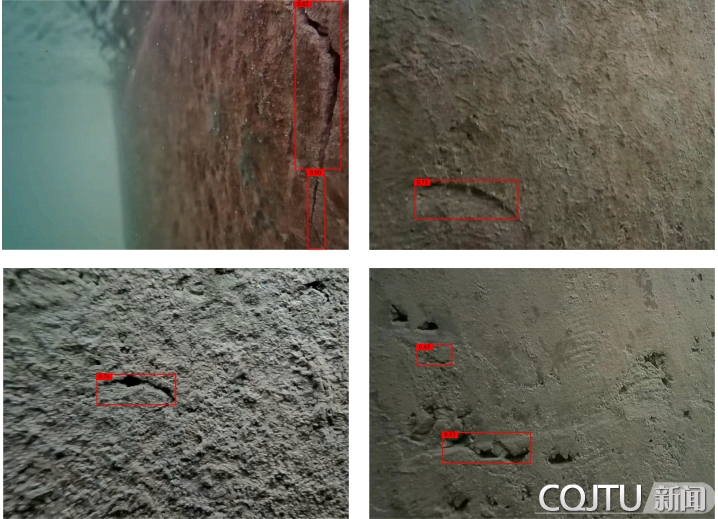
该论文基于董绍江团队自研的携带高清防水摄像头的多种运动模式的ROV水下机器人,针对跨水大桥桥墩裂缝图像数据采集困难,样本少,识别率低等难点展开研究。基于ROV采集黄花园大桥,涪江二桥的水下桥墩壁面数据,结合陆地开源裂缝数据,利用改进的CycleGAN网络将两者风格迁移生成水下桥墩裂缝数据。其次在生成的数据基础上,训练并提升桥墩裂缝检测模型UCRT-DETR实现水下桥墩裂缝的高精度,高效率检测。最后通过团队搭建的上位机软件在重庆市涪陵区攀华码头的实际测试验证了ROV的稳定性能,以及检测模型的效果。


《Automation in Consturction》是土木工程信息领域的国际顶级期刊,在Control and Systems Engineering类期刊(242种)中排第名17,在Building and Construction类期刊(174种)中排5名,在Civil and Structural Engineering类期刊(310种)中排9名,具有广泛影响力。