11月14日,重庆交通大学南岸校区慧园B栋223办公室内气氛热烈,数学与统计学院特邀两位海内外顶尖学者——华中科技大学关治洪教授、美国罗文大学Ying (Gina) Tang教授,带来两场聚焦“类脑混合智能与无人系统”领域的前沿学术报告。全院数十位师生代表齐聚现场,共同领略智能科技前沿的创新魅力。
首场报告由Ying (Gina) Tang教授开讲,主题为《Sense·Reason·Act: A neuro-symbolic framework for generalized autonomous systems》。作为美国罗文大学电气与计算机工程系教授、本科生项目主任,Tang教授长期深耕信息-物理-社会智能领域,其研究获美国国家科学基金会(NSF)、美国陆军等多个联邦机构支持,兼具学术深度与产业落地价值。

报告中,Tang教授提出了一套神经符号“工具包”,旨在构建可跨领域运行的通用自主智能体——从沉浸式教学场景到航空领域,该框架通过融合基础模型(感知与语言)、结构化推理层(知识图谱、约束条件、规划器)与任务工具(模拟器、API),实现了复杂场景下的实时感知、实体关系建模与动态决策。“这套框架能有效应对现实场景中的复杂性、多样性与不确定性,为自主系统的泛化能力提升提供了新路径。”Tang教授结合实际案例的讲解,让在场师生对神经符号技术的应用场景有了更具象的认知。
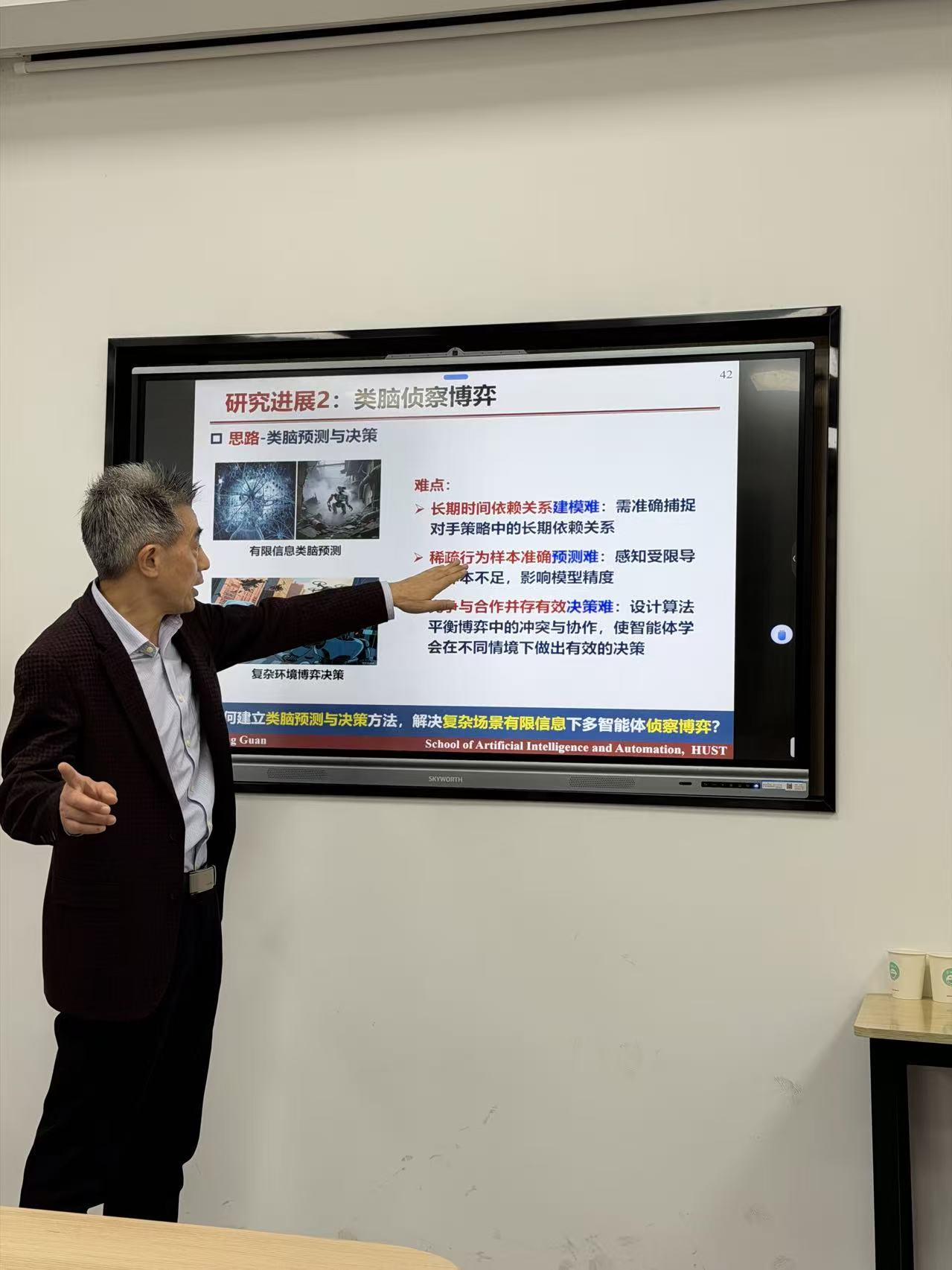
随后华中科技大学关治洪教授接棒开讲,以《类脑混合智能及无人系统研究》为主题,聚焦无人系统在复杂场景中的核心挑战展开分享。作为首批“华中学者领军岗教授”、爱思唯尔高被引学者,关治洪教授在脉冲混杂系统、多智能体系统等领域成果丰硕,曾获教育部自然科学一等奖、湖北省自然科学一等奖等重要奖项。
关治洪教授指出,传统单一系统或简单协作模式难以应对突发干扰、未知环境等极端条件,而类脑计算与混杂控制理论,正是突破这一困境的关键方向。他系统介绍了类脑混合智能的核心逻辑——通过协同与博弈研究,实现无人系统的自适应优化与全局效率提升,并分享了团队在该领域的最新研究进展,包括理论模型构建、仿真实验验证等内容,为在场师生展现了类脑技术赋能无人系统的广阔前景。
两场报告后,现场师生围绕“神经符号框架的落地难点”“类脑智能在交通领域的应用潜力”“跨学科研究的协作模式”等问题,与两位教授展开深入研讨。从技术细节到行业趋势,从理论创新到实践转化,交流环节气氛热烈。
本次学术交流不仅让师生近距离接触到智能科技领域的前沿成果,也为跨学科交叉研究、产学研融合探索积累了有益经验。